Method of structuring and compressing Labeled trees of arbitrary degree and shape
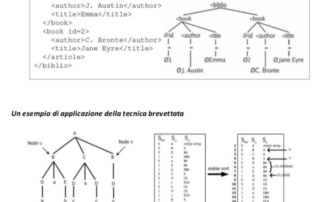
The patented invention involves a method of compressing labelled trees and supporting efficient research on them.
The patented invention involves a method of compressing labelled trees and supporting efficient research on them.
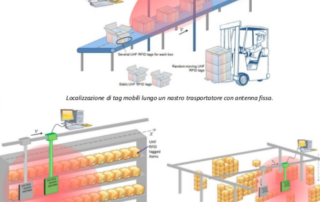
The invention deals with a localization method that finds application in localizing RFID-UHF tags in relative motion with respect to the RFID-UHF reader
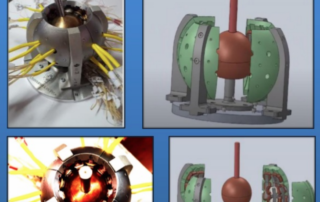
The proposed device aims to fill a gap in the field of electromagnetic and mechanical actuators. Creating a simple and compact actuator capable of simultaneously producing an active force/torque and a passive reaction with variable compliance.
The auto-localization system of RFID Robots in indoor environment (AURORA) is a low-cost, reliable and scalable system, which allows robots or other mobile devices to self-locate in an indoor scenario using passive UHF band RFID tags placed at known locations.
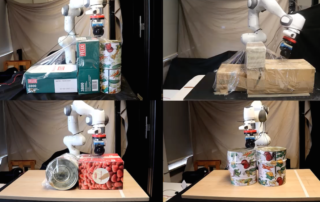
The device developed is a robotic transporter that can be used for moving objects. The device consists of one or more collaborative robotic arms (cobots) with gripping devices able to pick up types of objects different in size, shape and weight.
The invention concerns a highly adaptive and flexible automatic system for the removal of the protective film used for the packaging of pallets.
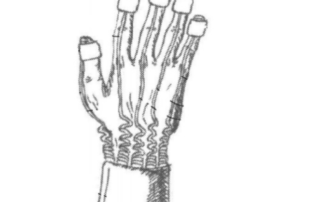
The object of the present invention is an under-actuated robotic hand with possible prosthetic application as well, i.e., a myoelectric hand having a number of actuators less than the number of degrees of freedom and capable of reproducing the movements of a human hand.
The present invention relates to a device for detecting the position and movement of a human limb comprising a plurality of sensory units connected to at least one coordination unit which manages the data coming from the sensory units and timers their flow.