Wearable active robot for body joints in series
The invention is an under-implemented assembly for a wearable active robot: a prosthetic device or an exoskeleton to aid motion or to replace an anatomical part
The invention is an under-implemented assembly for a wearable active robot: a prosthetic device or an exoskeleton to aid motion or to replace an anatomical part
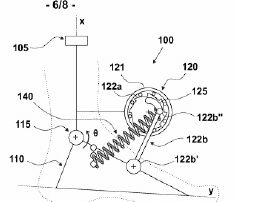
The patent protects a mechanism which has the characteristic of adding a small energy introduced into the step cycle by a mechanical actuator to a commercial prosthesis whose operation can be considered as a spring
The present invention provides an underactivated mechanism for a robotic shoulder exoskeleton suitable for transferring the flexion-extension reaction force generated during actuation of the shoulder joint through an actuator positioned at the shoulder joint of the flexion extension
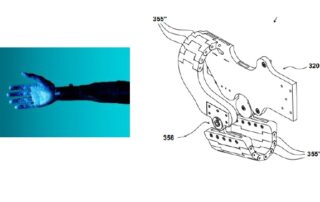
The patent protects a hand exoskeleton support frame that is characterized by two configurable straps able to be suitably configured to fit on a wide range of hands whose anthropometry is very varied (eg: S, M, L, XL).
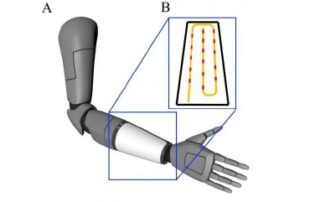
Tactile sensor emulates the human sense of touch in sensing and locating a pressure over a large surface, reproducing human mechanoreceptors activity.
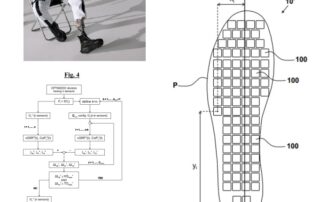
The patent protects the method (and the device associated with it) to optimize the positioning of pressure sensors within an engineered insole to return the center of pressure and plantar pressure
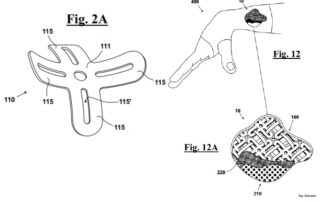
The patent protects a star-shaped element with at least three flaps which, when suitably interconnected with other adjacent ones and in several layers, constitutes an innovative layar jamming fabric.
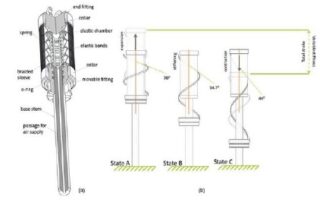
The device offered is a pneumatic braided muscle actuator, able to produce bi-directional force and motion, and variable stiffness
It is the purpose of the present invention to provide a sensor that allows to accurately monitor the pH value and its variations over time.
The invention concerns a wearable headset to create augmented reality using the "see-through" technique.