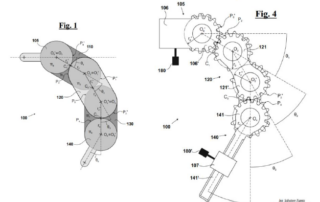
Kinematic chain for flexion-extension
This industrial patent proposes an apparently simple geometry (a degree of freedom) capable of arching by moving the center of instantaneous rotation of the end effector as a function of the input angle
This industrial patent proposes an apparently simple geometry (a degree of freedom) capable of arching by moving the center of instantaneous rotation of the end effector as a function of the input angle
The invention proposes the creation of a new type of actuator that allows to achieve adaptability to the environment, ensuring a high mechanical efficiency and high transmission force.
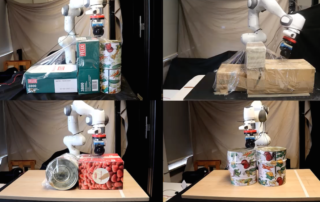
The invention consists of a method and related devices designed to manage the interaction between collaborative robots and human operators.
The device developed is a robotic transporter that can be used for moving objects. The device consists of one or more collaborative robotic arms (cobots) with gripping devices able to pick up types of objects different in size, shape and weight.
The invention concerns a highly adaptive and flexible automatic system for the removal of the protective film used for the packaging of pallets
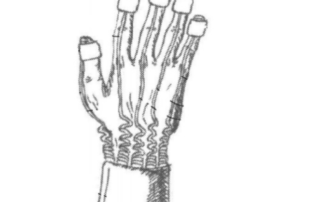
The present invention relates to a device for detecting the position and movement of a human limb comprising a plurality of sensory units connected to at least one coordination unit which manages the data coming from the sensory units and [...]