System for the magnetic localization and locomotion of an endoscopic capsule
The invention relates to a system for the localization and magnetic locomotion of an endoscopic capsule within a gastrointestinal tract
The invention relates to a system for the localization and magnetic locomotion of an endoscopic capsule within a gastrointestinal tract
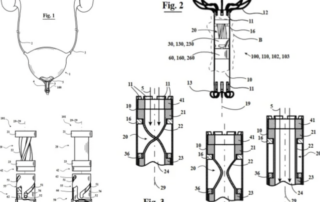
The present invention relates to an artificial sphincter for implantation in a urethral canal, in particular for treating patients suffering from urinary incontinence.
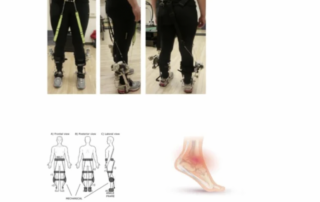
The invention is able to reduce the speed of the foot and store its energy in a group of springs: in this way, the body can freely continue its movements without further interaction with the exoskeleton.
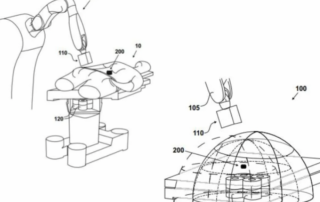
The invention is a tool installed as cap to the tip of an endoscope. The cap contains a teleoperation robot with 2 arms which the surgeon/endoscopist can control with an ergonomic console.
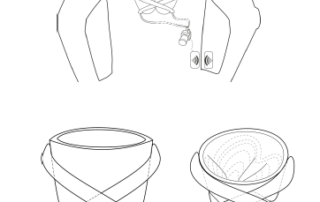
The invention is such as to provide an internal component and an annular component to this external one. The external component can have a stator role and the internal one a rotor role, or vice versa.
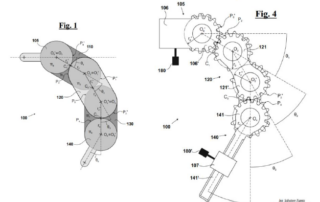
This industrial patent proposes an apparently simple geometry (a degree of freedom) capable of arching by moving the center of instantaneous rotation of the end effector as a function of the input angle
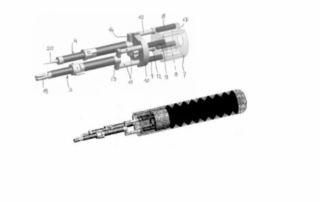
This patent is focusing on an artificial heart muscle, an innovative artificial device able to replicate the natural human heart functionalities.
The patent is related to an exoskeleton for the guidance and assistance of flex extension movements of fingers and cylindrical objects grasping.
The present invention relates to an apparatus to be used for the production of wine immediately after harvesting the bunches, which consists in separating the berries from the stalk and at the same time dividing the berries into different ripening classes.
The invention proposes the creation of a new type of actuator that allows to achieve adaptability to the environment, ensuring a high mechanical efficiency and high transmission force.