Logistic device
The invention concerns a highly adaptive and flexible automatic system for the removal of the protective film used for the packaging of pallets.
The invention concerns a highly adaptive and flexible automatic system for the removal of the protective film used for the packaging of pallets.
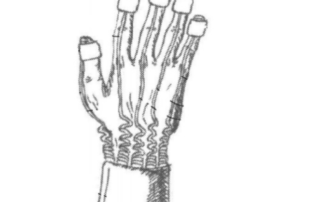
The object of the present invention is an under-actuated robotic hand with possible prosthetic application as well, i.e., a myoelectric hand having a number of actuators less than the number of degrees of freedom and capable of reproducing the movements of a human hand.
The present invention relates to a device for detecting the position and movement of a human limb comprising a plurality of sensory units connected to at least one coordination unit which manages the data coming from the sensory units and timers their flow.