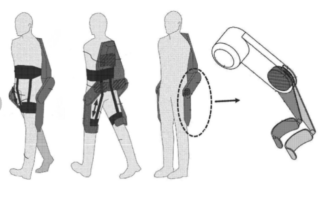
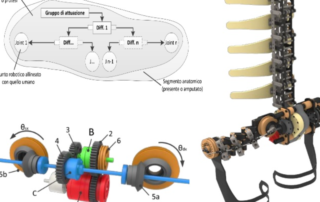
Exoskeleton for the assistance of polyarticular joints
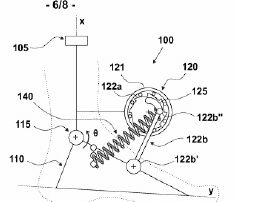
The invention is a polyarticulate exoskeleton that uses an underactuated kinematics, where the center of rotation of the anatomical joint is fixed and that of the exoskeletal joint has movement capability (bending) allowing the robotic structure to slide on the [...]