Method and device for making fingerprints associated to artifical fingers
The invention proposes a method and a casting device for the application of a silicone coating device for the application a rigid sensorised item.
The invention proposes a method and a casting device for the application of a silicone coating device for the application a rigid sensorised item.
The proposed mechatronic architecture is based on a sensor decoupled from the mechanical action of the robot, so as to provide a reliable measurement of the joint angle
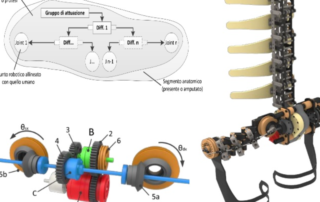
The invention is characterized by torque sensors applied to a differential device used inside a wearable robot.
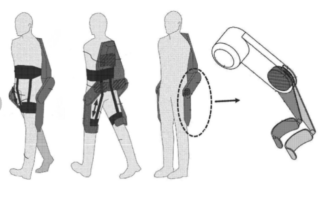
The invention is a transmission assembly of a hip exoskeleton associated with a back module.
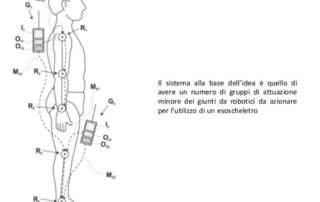
The invention refers to a selective sub-implementation system for exoskeletons
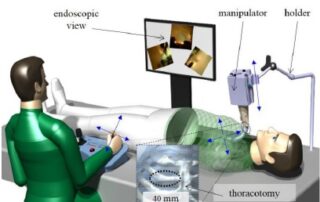
The present invention relates to a minimally invasive robotic manipulator for simulating, accessing and releasing of heart valves into a patient’s body, even equipped with an endoscopic vision system and a navigation system
The invention is an under-implemented assembly for a wearable active robot: a prosthetic device or an exoskeleton to aid motion or to replace an anatomical part
This patent responds to the need to make power transmission selective and, at the same time, to keep the weight of the device under control
The patent protects a mechanism which has the characteristic of adding a small energy introduced into the step cycle by a mechanical actuator to a commercial prosthesis whose operation can be considered as a spring
The present invention provides an underactivated mechanism for a robotic shoulder exoskeleton suitable for transferring the flexion-extension reaction force generated during actuation of the shoulder joint through an actuator positioned at the shoulder joint of the flexion extension