Wearable active robot with sensor means for feedback control
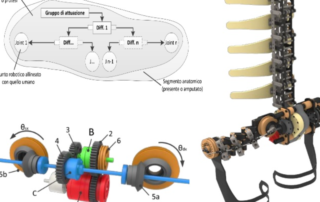
The invention is characterized by torque sensors applied to a differential device used inside a wearable robot.
The invention is characterized by torque sensors applied to a differential device used inside a wearable robot.
The invention is a transmission assembly of a hip exoskeleton associated with a back module.
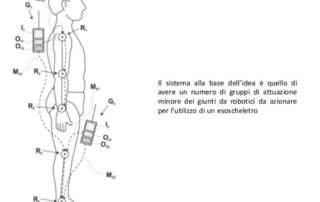
The invention refers to a selective sub-implementation system for exoskeletons.
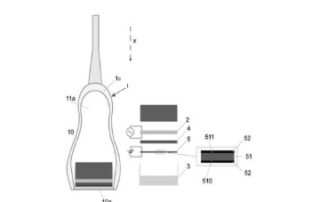
The invention refers to the sector of non-invasive investigations by means of ultrasound, both in the medical field and in the structural field of materials or objects.
The invention is a polyarticulate exoskeleton that uses an underactuated kinematics, where the center of rotation of the anatomical joint is fixed and that of the exoskeletal joint has movement capability (bending) allowing the robotic structure to slide on the anatomical structure. This invention is suitable for a wearable active robot
The present invention concerns the field of localization and support for the "intelligent" navigation of people in closed environments. Thus, it is particularly aimed at blind or visually impaired people
The invention namend CareToy is a modular smart «toy gym» for domestic use of premature babies and it is able to monitor a multiplicity of parameters, synchronize the information received and integrate it
The invention includes a mathematical method software actuated and the corresponding device for the best positioning of sensors in arrays made by at least three units useful to different types of sensors
The invention consists of an exoskeleton with a variable fit thanks to a hand-robot coupling system similar to the strap of a watch with links. Furthermore, an elastic component allows to have joints actuated in series with rigid control of the position and yielding of the force
The invention is a probe for the analysis of a surface, that is not easily available for an operator.