Odontoiatric video-endoscope
The invention consists of a device for intraoral dental video-endoscopy, which comprises a PC connected to at least one HD color monitor and to at least one intraoral video camera and / or nasal endoscope.
The invention consists of a device for intraoral dental video-endoscopy, which comprises a PC connected to at least one HD color monitor and to at least one intraoral video camera and / or nasal endoscope.
The technology consists of a contact force sensor comprising an inflatable balloon, a processing unit receiving a signal of changes in pressure or deformation in the balloon and a device for notifying the operator of the contact force signal (compliance of fabrics) calculated by the processing unit.
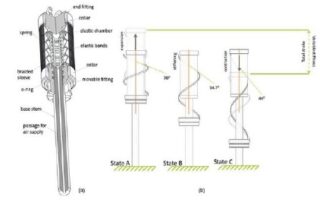
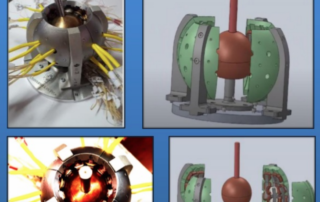
The device offered is a pneumatic braided muscle actuator, able to produce bi-directional force and motion, and variable stiffness
The proposed device aims to fill a gap in the field of electromagnetic and mechanical actuators. Creating a simple and compact actuator capable of simultaneously producing an active force/torque and a passive reaction with variable compliance.
The present invention relates to an electromagnetic radiation emitting device, particularly in the visible spectrum that is capable of simply and effectively modifying the primary emission spectrum of the device
The purpose of the present invention is to provide a method for geometric calibration of a cone-beam tomography equipment, in particular CT or pinhole-SPECT, that derives the misalignment parameters from the scan data of a generic object, thus without resorting to specific test-objects or dummies.
The invention relates to an original technique for improving the quality of images that are acquired during an oncology hadrontherapy treatment.
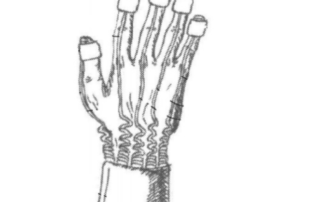
The object of the present invention is an under-actuated robotic hand with possible prosthetic application as well, i.e., a myoelectric hand having a number of actuators less than the number of degrees of freedom and capable of reproducing the movements of a human hand.
The present invention relates to a device for detecting the position and movement of a human limb comprising a plurality of sensory units connected to at least one coordination unit which manages the data coming from the sensory units and timers their flow.
The invention proposes an architecture able to solves particular problems via a novel data synchronization system based on SoC-FPGA devices and GPS-like time calibration algorithms.