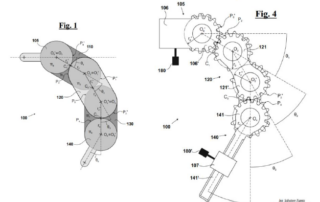
Kinematic chain for flexion-extension
This industrial patent proposes an apparently simple geometry (a degree of freedom) capable of arching by moving the center of instantaneous rotation of the end effector as a function of the input angle
This industrial patent proposes an apparently simple geometry (a degree of freedom) capable of arching by moving the center of instantaneous rotation of the end effector as a function of the input angle
The invention proposes the creation of a new type of actuator that allows to achieve adaptability to the environment, ensuring a high mechanical efficiency and high transmission force.
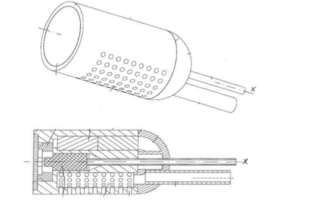
The invention relates to a magnetically-guided robotic device of the capsular type to carry out endoscopic procedures, in particular in the gastrointestinal tract.
The invention proposes a method and a casting device for the application of a silicone coating device for the application a rigid sensorised item.
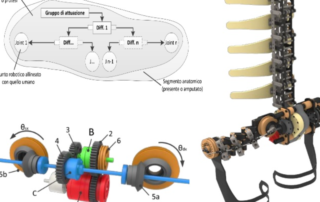
The proposed mechatronic architecture is based on a sensor decoupled from the mechanical action of the robot, so as to provide a reliable measurement of the joint angle
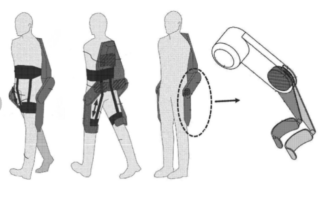
The invention is characterized by torque sensors applied to a differential device used inside a wearable robot.
The invention is a transmission assembly of a hip exoskeleton associated with a back module.
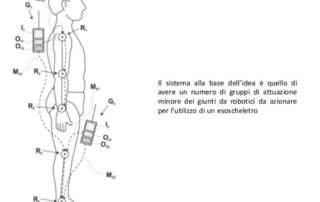
The invention refers to a selective sub-implementation system for exoskeletons.
The invention is a polyarticulate exoskeleton that uses an underactuated kinematics, where the center of rotation of the anatomical joint is fixed and that of the exoskeletal joint has movement capability (bending) allowing the robotic structure to slide on the anatomical structure. This invention is suitable for a wearable active robot
The invention describes the methods of production of encapsulated piezoelectric transducers, having optimal characteristics for use in the construction of haptic interfaces that can be incorporate into a printed polymeric material, such as a bracelet