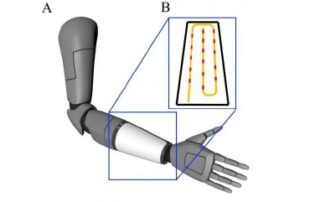
Tactile sensor for robotic arm
Tactile sensor emulates the human sense of touch in sensing and locating a pressure over a large surface, reproducing human mechanoreceptors activity.
Tactile sensor emulates the human sense of touch in sensing and locating a pressure over a large surface, reproducing human mechanoreceptors activity.
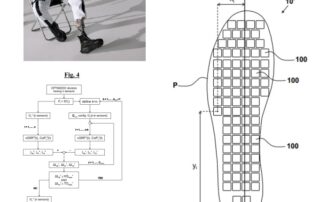
The patent protects the method (and the device associated with it) to optimize the positioning of pressure sensors within an engineered insole to return the center of pressure and plantar pressure
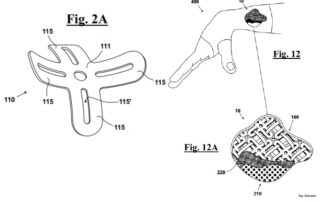
The patent protects a star-shaped element with at least three flaps which, when suitably interconnected with other adjacent ones and in several layers, constitutes an innovative layar jamming fabric.
The invention consists in a customizable exoskeleton haptic device for a finger, providing both kinesthetic stimuli along the finger and a three-dimensional skin force on the surface of the fingertip, which can be generated independently of each other or at the same time.
The invention is a haptic system consisting of a vibrotactile device or a pair of devices, configured to be worn on the body.
The invention consists of a method and related devices designed to manage the interaction between collaborative robots and human operators.
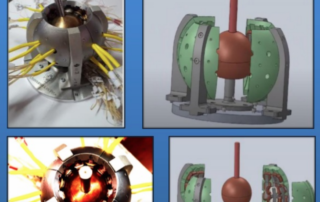
The technology consists of a contact force sensor comprising an inflatable balloon, a processing unit receiving a signal of changes in pressure or deformation in the balloon and a device for notifying the operator of the contact force signal (compliance of fabrics) calculated by the processing unit.
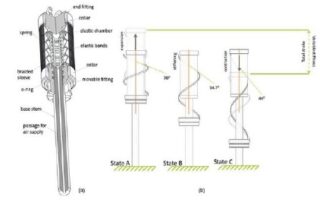
The device offered is a pneumatic braided muscle actuator, able to produce bi-directional force and motion, and variable stiffness
The proposed device aims to fill a gap in the field of electromagnetic and mechanical actuators. Creating a simple and compact actuator capable of simultaneously producing an active force/torque and a passive reaction with variable compliance.
The auto-localization system of RFID Robots in indoor environment (AURORA) is a low-cost, reliable and scalable system, which allows robots or other mobile devices to self-locate in an indoor scenario using passive UHF band RFID tags placed at known locations.