Estrusore artroscopico
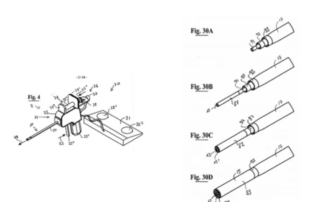
L'invenzione presenta uno strumento, nuovo nel suo genere, ideato al fine di erogare sostanze terapeutiche (ad es: biomateriali, cellule staminali, ecc.) durante interventi di chirurgia micro-invasiva in artroscopia.
L'invenzione presenta uno strumento, nuovo nel suo genere, ideato al fine di erogare sostanze terapeutiche (ad es: biomateriali, cellule staminali, ecc.) durante interventi di chirurgia micro-invasiva in artroscopia.
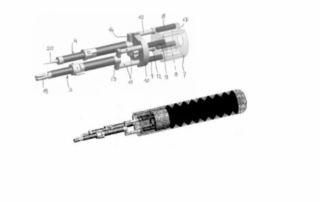
L’invenzione riguarda un sistema per la localizzazione e la locomozione magnetica di una capsula endoscopica all’interno di un tratto gastrointestinale.
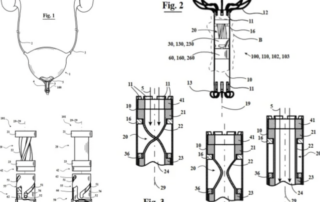
La presente invenzione si riferisce ad uno sfintere artificiale per impianto in un canale uretrale, in particolare per curare pazienti affetti da incontinenza urinaria.
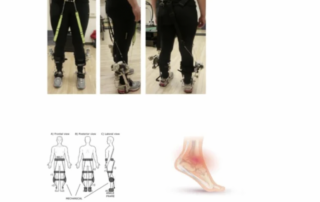
L'invenzione è in grado di ridurre la velocità del piede e di immagazzinare la sua energia in un gruppo di molle per permettere al corpo di continuare liberamente i suoi movimenti senza ulteriori interazioni con l'esoscheletro.
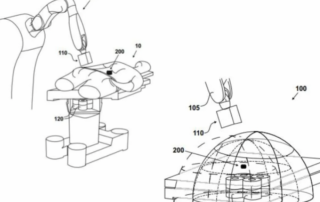
L'invenzione rappresenta strumento che va aggiunto come un cappuccio alla punta di un endoscopio. Il cappuccio contiene un robot di teleoperazione con 2 bracci che il chirurgo/endoscopista può controllare con una console ergonomica.
L'invenzione prevede un componente interno ed un componente anulare a questo esterno. Il componente esterno può avere un ruolo di statore, mentre quello interno un ruolo di rotore, o viceversa.
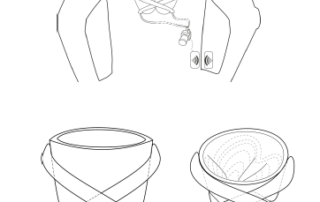
L'invenzione è incentrata su un innovativo dispositivo artificiale in grado di replicare le funzionalità del cuore umano. La presente tecnologia protegge almeno una ventricolo in grado di deformarsi sotto l’azione di una forza esterna generata da uno o più strati di elementi attivi, che la avvolgono.
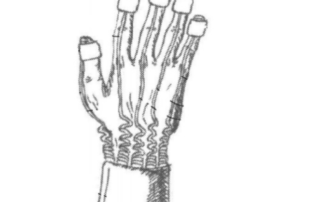
L'invenzione riguarda un esoscheletro per la guida e l’assistenza all’esecuzione di movimenti di flesso estensione delle dita di un mano e di presa cilindrica di oggetti.
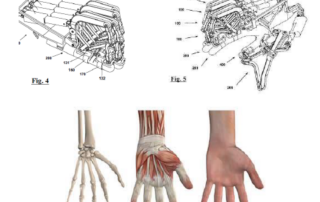
’oggetto della presente invenzione è una mano robotica sotto-attuata con possibile applicazione anche prostetica, ossia una mano mioelettrica avente un numero di attuatori inferiore a quello dei gradi di libertà e capace di riprodurre i movimenti di una mano umana.
La presente invenzione riguarda un dispositivo per la rilevazione della posizione e del movimento di un arto umano comprendente una pluralità di unità sensoriali collegate ad almeno una unità di coordinamento che gestisce i dati provenienti dalle unità sensoriali e ne temporizza il flusso.