Dispositivo robotico a guida magnetica per procedure di endoscopia
L'invenzione riguarda un dispositivo robotico di tipo capsulare a guida magnetica per l'esecuzione di procedure endoscopiche, in particolare nel tratto gastrointestinale.
L'invenzione riguarda un dispositivo robotico di tipo capsulare a guida magnetica per l'esecuzione di procedure endoscopiche, in particolare nel tratto gastrointestinale.
L’invenzione propone un sistema meccatronico atto alla navigazione remota teleoperata o autonoma all’interno delle tubature
L'invenzione propone un metodo e un dispositivo di colata (casting) per l'applicazione di un rivestimento in silicone su un sistema rigido sensorizzato.
L’invenzione è un architettura meccatronica che coadiuva il movimento in maniera intelligente, immagazzinando ed elaborando informazioni derivate dal movimento stesso
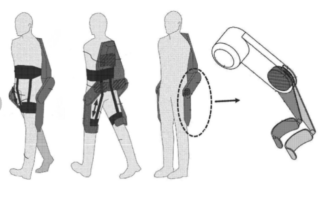
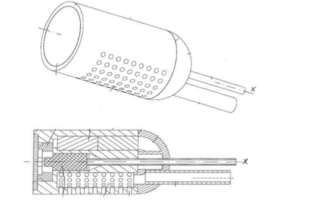
La seguente invenzione è un gruppo di trasmissione di coppia per un robot indossabile che consente una semplificazione della catena di trasmissione meccanica conservando, allo stesso tempo, una elevata affidabilità funzionale
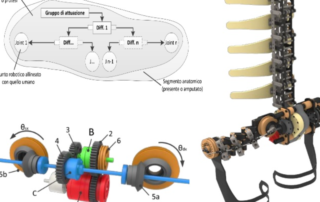
L’invenzione è un gruppo di trasmissione di un esoscheletro di anca associato ad un modulo di schiena.
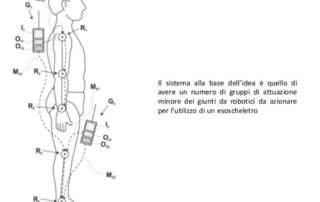
L’invenzione si riferisce ad un sistema di sott’attuazione selettiva per esoscheletri.
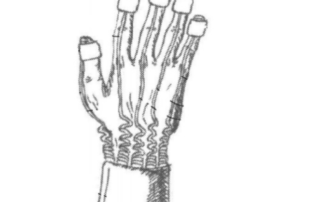
L’invenzione consiste in un esoscheletro a vestibilità variabile grazie a un sistema di accoppiamento mano-robot simile al cinturino di un orologio con maglie
La presente invenzione riguarda un dispositivo per la rilevazione della posizione e del movimento di un arto umano comprendente una pluralità di unità sensoriali collegate ad almeno una unità di coordinamento che gestisce i dati provenienti dalle unità sensoriali e ne temporizza il flusso.